
In recent years, the rapid development of drones has formed a wide variety of categories. Among them, drones that can be used to complete various tactical tasks are called tactical drones. Tactical drones include a variety of types of drones such as fixed-wing and rotary-wing.
Tactical drones are mainly used in battlefield video surveillance surveillance and wireless communications relay. Among them, UAVs are used as communications relay platforms for communication support. Compared with satellite communications and land mobile communications, they have the advantages of convenient deployment, flexible control, and easy upgrade and replacement of communication devices. The U.S. military "UAV System Roadmap 2005-2030" plans to use UAVs as communication relay platforms.
The platforms that are usually used to build communication relay systems are mainly fixed-wing UAVs and unmanned helicopters. These platforms have the advantages of strong load carrying capacity, long-distance flight, and long working hours for short delays. Ground monitoring and control systems are complex and require high maintenance and maintenance defects. Therefore, fixed-wing drones and unmanned helicopter platforms are mainly suitable for communication protection in a range of hundreds of kilometers, and have a relatively low cost performance for small-scale high-mobility tactical combat communications. The newly developed micro multirotor UAV has an advantage in the field of tactical communications.
Multi-rotor UAV development and characteristics
1.1 Development of multi-rotor drones
As early as the middle and early 20th century, France, the United States and other countries have begun to develop quadrotor aircraft. However, due to the poor design of the engine at the time, the flight altitude could only reach a few meters, and the operation was very complicated. The speed, payload, and endurance could not compete with traditional aircraft, and the military application value was not high. Until the 1990s, with the development of Micro-Electro Mechanical Systems (MEMS), the MEMS inertial navigation system with a weight of only a few grams was developed, making it possible to create automatic controllers for multi-rotor aircrafts. However, due to the limited computing power of the single-chip microcomputer at that time, it was not enough to meet the needs of the complex multi-rotor flying automatic controller algorithm. The multi-rotor aircraft only entered the consumer market through the toy market in a unique way. From 2005 to 2010, Germany's Microdrones has successfully launched the md4 series four-rotor UAV system in the global professional drone market. In academic terms, the demand for quadcopters developed rapidly after 2005, and more academic researchers began to study multi-rotors, which led to the gradual resolution of bottleneck technologies that restrict multi-rotor aircraft systems, and the integration and miniaturization of multi-rotor drones. The modularization, standardization and automation levels have rapidly increased. In particular, in the past two to three years, mobile terminals have used a large number of accelerometers, gyroscopes, and geomagnetic sensors. MEMS inertial sensors have emerged on a large scale, with higher integration and lower cost, which has effectively promoted the development of multi-rotor UAV technology. At present, there are many private enterprises in China that produce multi-rotor UAVs and occupy a considerable international market.
1.2 Features of Multi-Rotor Drones
Compared with fixed-wing drones and unmanned helicopters, multi-rotor drones have the following characteristics:
In terms of maneuverability, the control of multi-rotor drones is the simplest. It does not require a runway for vertical take-off and landing, and it can hover in the air after take-off.
In terms of reliability, multi-rotors perform best. Multi-rotor drones have no moving parts. Its reliability basically depends on the reliability of the brushless motor, so the reliability is relatively high.
However, multi-rotors also have their own development bottlenecks. Its movement and simple structure depend on the timely change of speed of the propeller to adjust the force and moment. This method should not be extended to larger rotors. Of course, the multi-rotor load capacity can be improved by increasing the number of blades, but this method will greatly reduce the reliability, maintainability, and endurance. Analysis of various reasons shows that the most advantage of development is the micro multi-rotor drone [1].
For example, the main performance parameters of a micro four-rotor UAV: ​​maximum take-off weight of 5,550 g; maximum payload of 1,200 g; battery weight of 1,750 g; time left for about 40 min (payload 500 g) Climb rate is 7.5 m/s; cruising speed is 15.0 m/s; ambient wind is 9 m/s; flying height is maximum 1 000 m; working altitude is 4 000 m; power configuration 4×250 W disc type Brushless direct drive motor; navigation system for DGPS; control mode: remote control, GSM network remote control, automatic driving.
1.3 Problems in Communication Applications
The micro-multi-rotor UAV system is maturing. Due to its easy portability, low landing and landing requirements, simple operation, low training and security requirements, and no prominent features such as airspace coordination, it has developed rapidly in civil fields such as aerial photography, surveillance, and express delivery; it has also been successfully applied to military reconnaissance. Surveillance and geographical mapping.
However, since the existing micro-rotor drones are powered by batteries, the battery life is very limited. It is generally less than 1 hour that the air-conditioning time is about 1 kg under a mission load condition. Although the method of using multiple drones to work in rotation is also a solution, the guarantee will be greatly reduced. In the actual tactical environment, because the micro-multi-rotor drone cannot provide continuous communication relay protection, the communication relay node directly constructed by it does not have practicality.
Therefore, to use a multi-rotor UAV for relaying wireless communications, the problem of persistent lag must be resolved. Recently, the tethered multi-rotor UAV adopts terrestrial cable tethered power supply to realize the multi-rotor continuous stagnation work, which opens up new ideas for the application of multi-rotor UAVs in tactical communications.
Multi-rotor UAV working principle and characteristics
2.1 System Composition
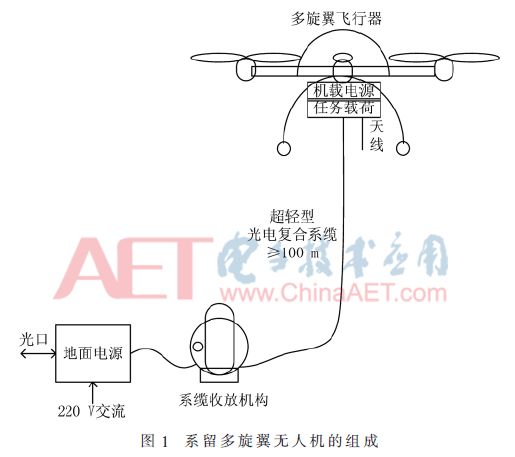
The mooring multi-rotor UAV is a moored airborne power module and an ultra-light optoelectronic composite mooring cable connected to an ordinary multi-rotor drone, and is connected to a ground power supply device instead of the original on-board battery [2]. As shown in Figure 1, the main components of the system include: multi-rotor aircraft, mission loads (including antennas), airborne power supplies, ultra-light composite mooring lines, mooring lines, and ground power supplies.
2.2 Working Principle and Performance
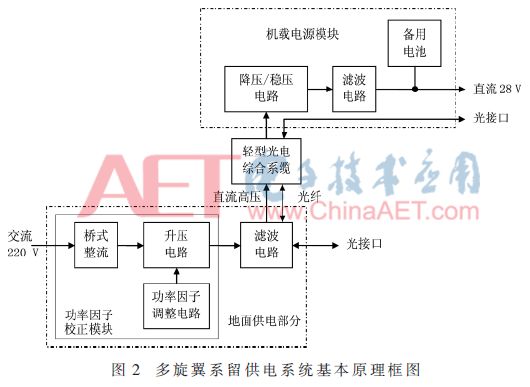
The most critical improvement for mooring multi-rotor drones is to increase the tethered power supply system. The basic principle is shown in Figure 2 [2]. The ground power supply converts ground 220 V AC into high voltage and transmits it to the on-board power through the umbilical cable, and then converts it into the power supply for the aircraft and the mission load. In addition to the supply conductors, the tether cable also has two single-mode fibers that can be used for wide-band signal communication between airborne task payloads and ground equipment.
The efficiency of the power factor correction module in the ground power supply section can reach 95% or more, and the rated output current of the aircraft and the load supplying 28 V DC is about 40 A (the output power is 1 120 W).
Light-weight photoelectric integrated cable is made of 2 wires, 2 B1.1 single-mode tightly-wrapped optical fibers and aramid twisted, and the core is loose-wrapped with polyethylene sheath. The tether can withstand 100 N pulling force, the conductor DC resistance is not more than 0.094 Ω/m, the inter-insulation core voltage is 1000 V, and the weight is only about 11 g/m.
The on-board power supply module replaces the battery part of the original free flying quadrotor unmanned aerial vehicle, with a peak power of 1 500 W and an efficiency of more than 90%. A small-capacity lithium battery is also reserved in the onboard power supply module for providing emergency power to the aircraft when the ground power supply is interrupted unexpectedly or when the tethered power supply system fails. This ensures that the aircraft has enough time to safely land on the ground. The total weight of the entire on-board power module with the structure attached to the heat sink is not more than 1 200 g.
The payload includes the mission load weight and the tether weight used from the aircraft to the ground. According to the weight per unit length of the cable 11 g/m, the length of the loadable tether under different task load weight conditions can be obtained, that is, the maximum retention height is shown in Table 1. It can be seen that when the tethered flight altitude is 100 m, the effective mission load capacity is about 1 kg.

Application of Tethered Multi-rotor UAV in Military Communication
3.1 Military needs
The future integrated combat system pursues true mobile communications. Combat personnel move the operational command in the broadband mobile network, and seamless broadband connections between combat platforms share information. However, in a terrestrial communications network, connectivity, mobility, and large capacity are mutually inconsistent. Enhancing the performance of either side will limit the performance of the other two. Comprehensive improvement in connectivity, mobility, and large capacity is the development of military communications. Key challenges. Satellite communications and medium and large drone air communication nodes can effectively solve the contradiction between coverage, mobility and large capacity in military communications. However, due to limited satellite resources, large and medium-sized drones are required to take off and landing, and the conditions of protection are demanding. They cannot meet the requirements of terminal tactical communication support for sub-branches of light and high-powered infantry, special operations, airborne, and marines.
Through the above analysis, it can be seen that the moored multi-rotor UAV is small and light, and has a load carrying capacity of about 1 kg when it is hovering and hovering at a height of 100 m. It also uses the ground power supply for continuous power supply, has no limit of battery life, and is set up quickly. It is a very good communication relay platform that requires no airspace application and simple operation and protection.
3.2 Communication coverage expectation
The airborne wireless relay platform mainly obtains the extension of the line-of-sight by increasing the communication equipment, and changes the non-line-of-sight propagation channel to the line-of-sight propagation channel, thereby realizing the improvement of the communication distance or coverage. Normally, the line-of-sight increases with the height of the liftoff, and the corresponding propagation conditions improve more significantly. Considering the refraction effect, the formula for the line of sight is:

In the formula, do is the line of sight, the unit is km; h1 and h2 are the aerial height or antenna height of both ends, the unit is m.
In an ideal flat surface, if the two parties communicate using handheld devices, the antenna height is 1.5 m, and the theoretical calculation line-of-sight is 10.1 km. When one of them was elevated to 100 m with the platform of a multi-rotor wing system, the viewing distance was improved to 46.2 km.
The line-of-sight is only the communication limit distance under the ideal condition, but in the practical application, the communication distance of the device is affected by the terrain feature conditions and the communication load design index. In the mobile communication system, the Omura model is a classical wave propagation prediction model that describes the relationship between propagation loss and distance, frequency, and antenna height under various terrain features after data analysis and statistical processing based on a large number of field strength tests. The following uses the typical tactical communication radio station of the US military as an example to estimate the communication coverage capacity under the conditions of terrain and features after the mooring multi-rotor UAV has been lifted to the air, based on typical design indicators, and communicates with the ground when the ground is not lifted. Compared.
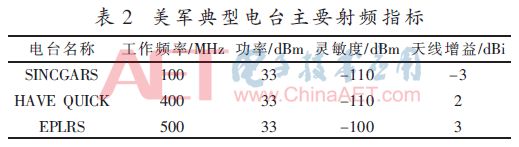
The main radio frequency indicators of the three types of typical equipment in the US military's active tactical radio stations are shown in Table 2. For ease of calculation, the operating frequency is an approximation of the maximum operating frequency of each device. Power and antenna specifications take into account the capabilities of conventional multi-rotor UAV platforms.
The Okumura model uses the path loss of a quasi-flat terrain in a metropolitan area as a benchmark, and corrects factors such as different propagation environments and topographic conditions with correction factors. The basic calculation method is as follows:
Free propagation loss:
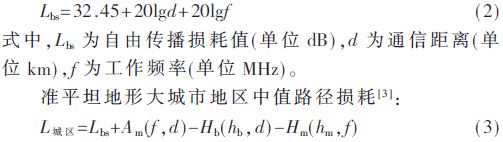
In the formula, Am(f, d) is the median loss of relative free space when the base station antenna height hb is 200 m and the mobile station antenna height hm is 3 m in a large city; Hb(hb,d) is the base station antenna height The gain factor, ie, the gain of the actual base station antenna relative to the standard antenna height hb is 200 m; Hm(hm,f) is the mobile station's height gain factor. Am(f,d), Hb(hb,d), and Hm(hm,f) are all available in the model [3].
Based on the loss of the median path in the quasi-flat terrain, the median path loss in the irregular terrain and environment can be obtained by correcting the correction factor for various factors in different propagation environments and irregular terrain. For example, the median path loss calculation formulae for suburban, hilly, and land-water mixed regions are:

Among them, Kmr, Kh, and Ks are correction factors for suburban, hilly, and irrigated landforms, respectively.
On this basis, according to the radio frequency indexes of various communication loads, including the transmission power P, the antenna gain (transmitting antenna gain GT and receiving antenna gain GR), receiving sensitivity S, etc., different devices can be obtained at different coverage distances in different propagation environments. The link margin:

In the formula, the link loss L is selected according to different scenarios, such as L city, L suburb, L land and water.
When A = 0 in equation (7), the value of the corresponding distance d is the limit coverage radius under the corresponding conditions.
Based on the Okumura model, the communication coverage capabilities of the three typical tactical communication stations listed in Table 2 under 100 m airborne conditions were estimated. By referring to the relevant charts in the Omura model and using equation (7) to calculate the communication coverage radius under the conditions of five different landforms: coast (water-land ratio 100), suburbs, urban areas, hills with 50 m height difference and 100 m height difference hills. The estimated value is shown in Figure 3.

According to the prediction result of similar radio stations in the literature [4] on the ground communication distance, compare the limit radius of the three kinds of equipment when the two sides are communicating on the ground and unilaterally lift 100 m in various terrain conditions, as shown in Figure 4. As shown.
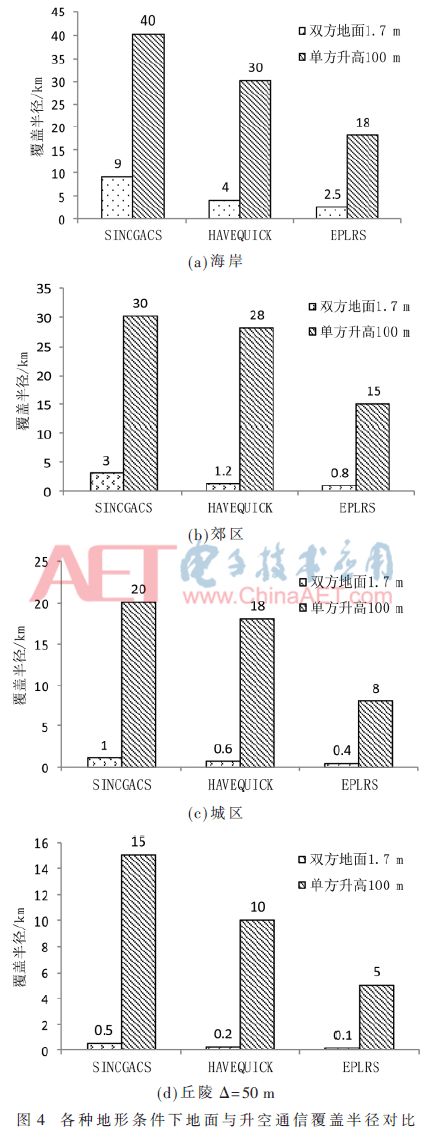
It can be seen from Figure 4 that the effect of terrain on communication distance increases with the increase of undulating height difference; under the same terrain conditions, the communication distance of high-frequency or wide-bandwidth tactical stations is small. Compared with terrestrial communications, the use of a tethered multi-rotor UAV to lift 100 m of land has improved the coverage under various terrains, and the coverage radius has expanded at least four times. Comparing the coverage effect of different types of tactical radio stations on the coast, urban areas or hilly terrain, the more complex the terrain is, the more obvious the improvement effect is. This is because the aerial object effectively blocks the shielding of signal propagation and achieves direct line-of-sight propagation.
3.3 Application Features and Development Trends
The moored multi-rotor UAV is small in size and can be carried by individual soldiers or light vehicles. It has very low requirements for take-off and landing sites and maintenance, and is very suitable for use by class-shift small mobile units. The main battle application scenarios include:
(1) Improve the communication coverage within the combat unit. Tailed multi-rotor drones are used to raise the radio stations of important members (such as monitor) in combat units to form superior nodes to achieve reliable connections with other members, form a star-connected network, and solve the problem of obstructions due to topographic features. The problem of poor communication between members of the combat unit.
(2) As a horizontal cooperative communication link between combat units. When there is a need for cooperative communication between combat units but no direct connection can be established due to distance or terrain effects, each unit can use a multi-rotor drone to carry a radio station to increase the establishment of over-the-horizon communication links across combat units. To achieve horizontal and cooperative communications among combat units.
(3) As information return channel. When a combat unit is far away from the rear communication infrastructure or blocked by obstacles on the wireless transmission path and cannot communicate directly, a tethered multi-rotor UAV can be equipped with a radio station to raise the bridge between the combat unit and the rear infrastructure. , to achieve combat information and return.
At present, due to the limitation of the load capacity of multi-rotor UAVs, the weight of communication relay equipment that can be carried can generally not exceed 2 kg. Therefore, most tactical radio stations cannot be directly carried and must be lightened and improved. When designing a multi-rotor UAV communication relay platform for mooring, the electromagnetic interference radiation of the drone and the tethered power supply system should also be minimized to avoid interference with the communication load and affect the communication effect.
In the near future, with the development of UAV technology, the working efficiency, load capacity, and stability of multi-rotor UAVs will be further enhanced, and the communication load capacity and lift-off height of multi-rotor UAV communication relay platforms will be retained. The communication coverage capacity is also correspondingly improved. It will realize ultra-low altitude tactical communication networks with multi-machine ad hoc networks, flexible multi-channel configuration of one machine, trunk network and wireless access.
in conclusion
Through the installation of a tethered power supply system, the problem of continuous lagging of multi-rotor UAVs can be solved, creating conditions for its application in the field of tactical communications. The mooring of multi-rotor UAVs as a communication relay platform can improve the coverage of tactical radio stations, and can be applied to the internal communications, horizontal communications, and upper-backhaul communications of mobile combat units, significantly improving combat command capabilities. With the advancement of related technologies, the ultra-low altitude tactical communication network formed by the tethered multi-rotor UAV platform in the future has a development prospect that cannot be underestimated.
ZGAR PCC KIT
ZGAR electronic cigarette uses high-tech R&D, food grade disposable pod device and high-quality raw material. All package designs are Original IP. Our designer team is from Hong Kong. We have very high requirements for product quality, flavors taste and packaging design. The E-liquid is imported, materials are food grade, and assembly plant is medical-grade dust-free workshops.
From production to packaging, the whole system of tracking, efficient and orderly process, achieving daily efficient output. We pay attention to the details of each process control. The first class dust-free production workshop has passed the GMP food and drug production standard certification, ensuring quality and safety. We choose the products with a traceability system, which can not only effectively track and trace all kinds of data, but also ensure good product quality.
We offer best price, high quality Vape Device, E-Cigarette Vape Pen, Disposable Device Vape,Vape Pen Atomizer, Electronic cigarette to all over the world.
Much Better Vaping Experience!

E-Cigarette Vape Pen,Disposable Device Vape,PCC SET, Vape Pen Atomizer,Latest Disposable E-Cigarette OEM vape pen,OEM electronic cigarette
ZGAR INTERNATIONAL(HK)CO., LIMITED , https://www.zgarette.com