
Based on the requirements of simultaneous control of position and force in grinding robot operation, based on the analysis of position servo force/bit hybrid control strategy, the force/bit hybrid control strategy based on speed servo is studied. Filtering, gravity compensation and calibration of the sensor coordinate system are performed to improve the anti-interference and accuracy of the measured force signal. The simulation results show that the scheme can meet the requirements of the grinding robot for the position and force control.
With the advancement of science and technology and the continuous development of the manufacturing industry, the market demand for polishing and polishing continues to grow. However, at present, the grinding and polishing processing in China is mainly labor-based, the artificial grinding efficiency is low, time-consuming and labor-intensive, the precision is not high, and the uniformity of products is poor, the working environment of workers is difficult, and it is difficult to achieve automatic production, which has become a bottleneck for the further development of the polishing industry. Therefore, the research on automatic polishing equipment has attracted wide attention from many universities, research institutions and companies.
Grinding and polishing robots enable high-efficiency, high-quality automated sanding, providing an effective solution to replace manual sanding. The core of the grinding robot is the force control technology. The quality of the grinding is ensured by controlling the machining trajectory and the force at the end of the grinding tool, that is, both the position and the force of the robot are controlled. At present, more and more position-controlled robots have been developed at home and abroad, and many researches have been carried out on force-controlled robots. However, most of the force-controlled robots are based on position servo, and their response time is long, and the force cannot be directly controlled. Affects the accuracy and effectiveness of force control. In view of the above situation, the author studied the force-controlled grinding robot based on speed servo, and gave the composition of the grinding robot system. The measured force signal was filtered, gravity compensation and sensor coordinate system calibration, and the measured force signal was improved. Anti-interference and accuracy, and finally the simulation experiment of the above algorithm.
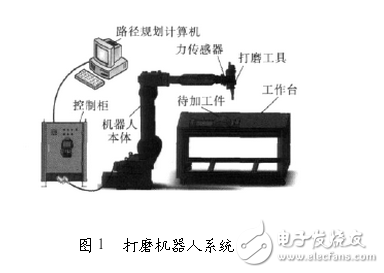
1 grinding robot system compositionThe grinding robot system (Fig. 1) consists of a new 6kg industrial robot body, a robot control cabinet, a path planning computer, a grinding tool, a six-dimensional force-torque sensor and a grinding table. The six-dimensional ATI force-torque sensor is mounted on the robot six. The shaft end flange is used to measure the force and moment of the x, y, and z directions in the sensor coordinate system. The sanding tool is mounted on the measuring surface of the force-torque sensor via a connecting piece. The path planning computer is used to plan the grinding path of the sanding tool on the workpiece to be machined, and its output is connected to the robot control cabinet. The machining process of the grinding robot is: first, the path planning computer plans the grinding path of the grinding tool on the workpiece, and transmits the planned robot position information to the robot position controller, and the robot position controller drives the robot to reach the corresponding position to start grinding, The force-torque sensor measures the amount of force between the grinding tool and the workpiece, and transmits the measured information to the force controller. The force controller adjusts the robot to keep the force between the sanding tool and the workpiece relatively constant, thus ensuring sanding. Effect.
2.1 filter design
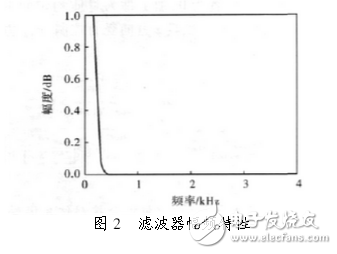
In the actual measurement, the sensor will be affected by various factors, the measurement data will fluctuate, and the accuracy of the force control will be affected. Therefore, the data should be filtered after the data measured by the force sensor. Since the noise signal is mostly distributed in the high frequency part and the signal is concentrated in the low frequency part, the Butterworth digital low pass filter is used to filter it.
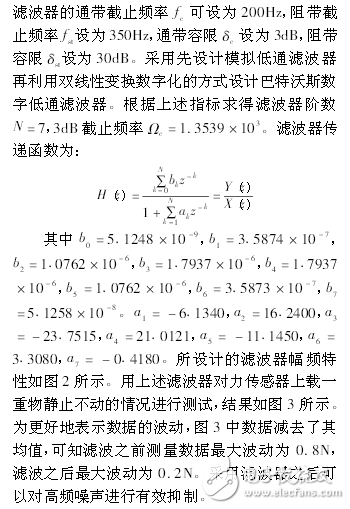
ATI force-torque sensor sampling frequency fs is 7000Hz, according to the actual measurement, its working frequency range is concentrated in 0-200Hz, and the noise signal is distributed in the high-frequency part, so the Butterworth low-pass
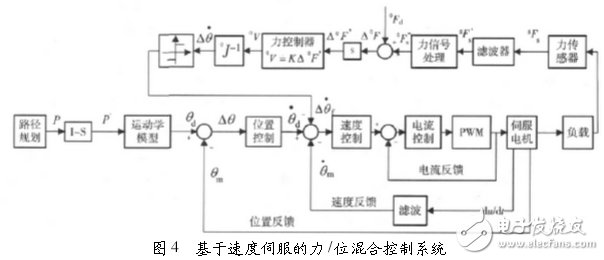
The general idea of ​​this program is divided into two parts:
a. Establish robot tool end measurement force and joint space
The relationship between speed. The force measured at the end of the robot tool is converted into a joint space velocity signal, and the signal is added to the speed loop of the servo motor. This speed servo-based force control strategy is faster than the position servo based force control strategy, and the force can be directly controlled.
b. The force/bit mixing control strategy is adopted to select whether each direction is position control or force control through the S matrix, which satisfies the requirements of the grinding application for both force and position control.
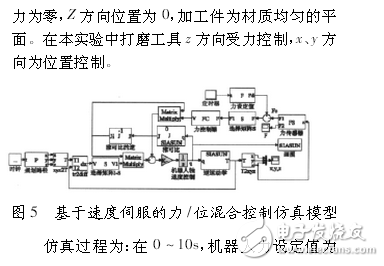
Figure 4 shows a block diagram of a force/bit hybrid control system based on speed servo. It can be seen from the figure that the control scheme mainly includes two control loops: a force control loop and a position control loop. In the force control loop, use the ATI force sensor to measure the external force and get
The author studied the force/bit hybrid control strategy based on speed servo, and gave the composition of the grinding robot system. The collected force signals were filtered, gravity compensated and sensor calibration were processed to eliminate the interference of external force measurement information. . The simulation experiment is carried out on the control algorithm. The experimental results show that the algorithm can meet the requirements of position and force control for robot polishing applications.
MS Three-Phase Aluminum Housing Electric Motor
MS Series 3-phase Aluminum Housing Induction Motor
MS series motor is totally enclosed and fan cooled 3 phase squirrel cage induction motor. It is newly designed in conformity with the relevant rules of IEC&DIN42673 standards. Y connection for motor of 3kw and below. Delta connection for 4kw and above.
Application:
MS serise 3 phase motors are widely used as driving equipments of various machineries such as: machine tools, blowers, pumps, compressors, transporters, agricultural and food processing.
Operating Condition:
Ambient temperature: -15°c to 40 °c
Altitude: ≤1000m
Rated voltage: 380V, 400V, 415V, 220V, 230V, 240V, etc
Rated frequency: 50HZ, 60HZ, 50HZ/60HZ
Duty: Continuous(S1)
Insulation class: Class B, Class F
Protection class: IP44, IP54, IP55
Cooling method: IC0141
Note:
The voltage and frequency could be made according to your request. If there is any requirements or inquiries, welcome to contact us.




MS Three-Phase Electric Motor,10KW Electric Motor,3 Phase AC Motor,Three Phase Electric Motor
FUZHOU LANDTOP CO., LTD , https://www.landtopcos.com