
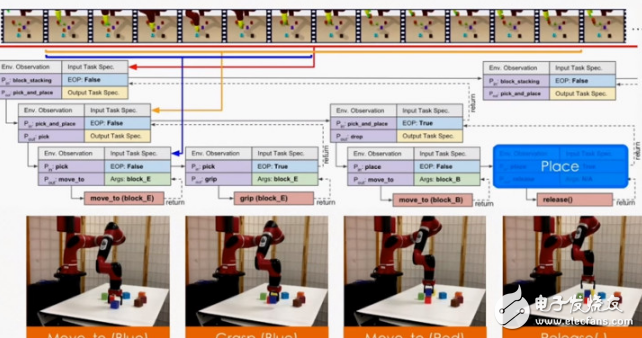
At the IROS conference in Vancouver, Li Feifei, a renowned computer vision expert and director of Stanford's AI Lab and Vision Lab, delivered a talk titled "A Quest for Visual Intelligence." This marked her first participation in the IROS robot-focused conference. Notably, a groundbreaking paper titled *Neural Task Programming: Learning to Generalize Across Hierarchical Tasks* was recently published on Arxiv. The lead author of this paper is from Stanford, with Li Feifei and her husband, Silvio Savarese, serving as co-advisors. This development highlights the growing convergence between artificial intelligence and robotics, especially in visual perception and understanding, and signals a future of closer interdisciplinary collaboration.

All Accessories Of Laser Level
Green Laser Protective Glasses,Laser Protection Glasses,Laser Protection Eyewear,Laser protection
Guangdong Tumtec Communication Technology Co., Ltd , https://www.gdtumtec.com